MPU-6050 ဖြင့်စွမ်းဆောင်ရည်ကိုပိုမိုကောင်းမွန်အောင်ပြုလုပ်ခြင်း - setup, စံကိုက်ညှိနှင့် application များ
2024-04-25
9261
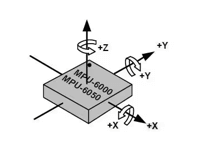
MPU-6050 ကမ္ဘာ့ပထမဆုံးပေါင်းစည်းထားသော 6-Axis Motion Procession procession အစိတ်အပိုင်းသည် 3-Axis Gyroscope 3-axis accelerometer နှင့် excitable digital motion processor (DMP) ကိုပေါင်းစပ်ထားသည်။၎င်းကိုအသုံးပြုခြင်း၏ရည်ရွယ်ချက်မှာ x, y နှင့် z ပုဒ်, လှိမ့်ထောင့်နှင့် yaw angle တို့အပေါ်တိုင်းတာရန်အရာဝတ်ထု၏တိမ်းစောင်းထောင့်ကိုရယူရန်ဖြစ်သည်။MPU-6050 (0 င်ငွေ) 6050 (0 င်ငွေ၏အရှိန်မြှင့်ခြင်းနှင့် 0 င်ရိုးသုံးခု angis angular angular angult advulation and velocity advality) အချက်အလက်ခြောက်ခုကိုကျွန်ုပ်တို့ဖတ်သည်။posture fusion fusion processing ပြီးနောက်, အစေး, လှိမ့်နှင့်ကောင်းလှေပြားများကိုတွက်ချက်နိုင်သည်။တိုင်းတာခြင်းတန်ဖိုးများအတွက် director ၏သွဒီနိတ်ညွှန်ကြားချက်အဓိပ္ပါယ်ဖွင့်ဆိုချက်သည်အောက်ဖော်ပြပါသွဒိနိတ်စနစ်၏နိယာမ (က x- ၏အပြုသဘောဆောင်သောလက်ျာဘက်ညွှန်ပြသည့်မှန်ကန်သောလက်ျာဘက်ညွှန်ကြားချက်များအတိုင်းလိုက်နာသောအောက်ဖော်ပြပါပုံတွင်ဖော်ပြထားသည်။0 င်ရိုးက 0 င်ရိုး၏အပြုသဘောဆောင်သော ဦး တည်ချက်နှင့်အလယ်လက်ချောင်းသည် z-axis ၏အပြုသဘောဆောင်သောလမ်းညွှန်ချက်ကိုညွှန်ပြသည်။ လမ်းညွှန်) ။
စာရင်း
Duedicated I2C Sensor ဘတ်စ်ကားဖြင့် MPU-6050 သည် External 3 -0 axis compute မှတိုက်ရိုက်ထည့်သွင်းနိုင်ပြီး 9-Axis MotionFIuss ™ output ကိုထောက်ပံ့ပေးနိုင်သည်။၎င်းသည်ပေါင်းစပ် gyroscope နှင့် accelerator timeline အကြားကွာဟမှုပြ problem နာကိုဖယ်ရှားပေးသည်။0 င်ရိုးသုံးသံမုတ်နှင့်ချိတ်ဆက်ပါက MPU-60x0 သည် 9-Axis Motion Fusion output ကို၎င်း၏အဓိက I2C သို့မဟုတ် SPI Port ကိုအပြည့်အ 0 ပေးနိုင်သည် (SPI Port ကို MPU-6000 တွင်သာရနိုင်သည်ဟုသတိပြုပါ။ )
အခြားနည်းလမ်းများနှင့်ညီမျှခြင်း
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050 ထုတ်လုပ်သူ
MPU-6050 ၏ထုတ်လုပ်သူသည် TDK ဖြစ်သည်။TDK မှတည်ထောင်သူနှစ် ဦး တည်ထောင်သူဒေါက်တာ Yogoro Kato နှင့် Takei Takei တို့သည်တိုကျိုရှိ Ferrite ကိုတီထွင်ခဲ့သည် Tokyo Denkikagaku Kogyo K.K. ကိုသူတို့တည်ထောင်ခဲ့သည်။1935 တွင် Global Electronics စက်မှုလုပ်ငန်းအမှတ်တံဆိပ်အနေဖြင့် TDK သည်အီလက်ထရောနစ်ကုန်ကြမ်းပစ္စည်းများနှင့်အီလက်ထရောနစ်အစိတ်အပိုင်းများရှိဒေသများတွင်အဓိကရာထူးကိုအမြဲတမ်းထိန်းသိမ်းထားသည်။TDK ၏ပြည့်စုံမှုနှင့်ဆန်းသစ်တီထွင်မှု - မောင်းနှင်သောထုတ်ကုန်အစုစုသည် ceramicum electrolsic capacitors, ရုပ်ရှင် capacitors, သံလိုက်ထုတ်ကုန်များ, သံလိုက်အစိတ်အပိုင်းများ, piezoelectric နှင့် protectors များ,သံလိုက်နှင့် mems sensor များ), စသည်တို့သည် TDK သည်လျှပ်စစ်ဓာတ်အားပေးပစ္စည်းများနှင့်စွမ်းအင်ကိရိယာများ, သံလိုက်ခေါင်းများနှင့်အခြားထုတ်ကုန်များကိုလည်းထောက်ပံ့ပေးသည်။၎င်း၏ထုတ်ကုန်အမှတ်တံဆိပ်များတွင် TDK, EPCOS, Indensense, Micronas, Tronics နှင့် TDK-Lambda တို့ပါဝင်သည်။
MPU-6050 ၏ပြည်တွင်းရေးပိတ်ပင်တားဆီးမှုပုံ
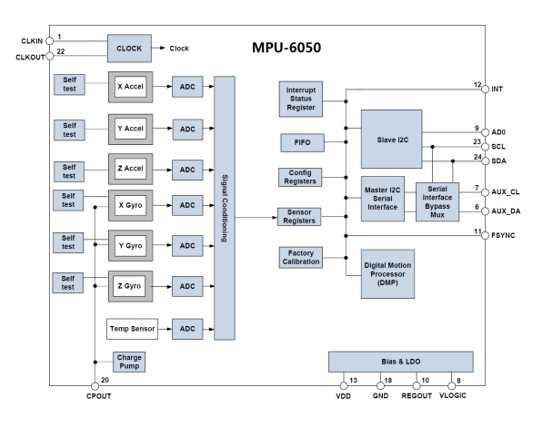
၎င်းတို့အနက် SCL နှင့် SDA တို့သည် MCU နှင့်ချိတ်ဆက်ထားသော IIC interfaces ဖြစ်ပြီး MCU သည် MPU-6050 ကိုဤ IIC Interface ကိုထိန်းချုပ်သည်။IIC Interface, အမည်ရှိ Aux_cl နှင့် aux_da လည်းရှိသည်။ဤ interface ကို Magnetic Sensor များကဲ့သို့သောပြင်ပကျွန်စက်များနှင့်ဆက်သွယ်ရန်,VLOGIC သည် IO port voltage ဖြစ်သည်။ဤ pin သည်အနည်းဆုံး 1.8V ကိုထောက်ပံ့နိုင်သည်။ကျွန်ုပ်တို့သည်များသောအားဖြင့်၎င်းကို VDD သို့တိုက်ရိုက်ချိတ်ဆက်ပါ။AD0 သည်ကျွန် iic interface (MCU နှင့်ချိတ်ဆက်ထားသော) လိပ်စာထိန်းချုပ်ရေး pin ဖြစ်သည်။ဤ PIN သည် IIC လိပ်စာအနိမ့်ဆုံးကိုထိန်းချုပ်သည်။အကယ်. ၎င်းသည် GND နှင့်ချိတ်ဆက်ပါက MPU-6050 ၏ IIC လိပ်စာ 0x68,၎င်းသည် VDD နှင့်ချိတ်ဆက်ပါက 0x69 ဖြစ်သည်။ဤနေရာတွင်လိပ်စာအနိမ့်ဆုံးအချက်အလက်များမှအနိမ့်ဆုံးအနိမ့်ဆုံး (အနိမ့်ဆုံး bit ကိုဖတ်ရန်နှင့်ရေးရန်အသုံးပြုသည်) မပါ 0 င်ကြောင်း ကျေးဇူးပြု. မှတ်သားပါ။MwbalancedStc15 တွင် AD0 သည် GND နှင့်ချိတ်ဆက်ထားပြီး MPU-6050 ၏ IIC လိပ်စာသည် 0x68 (အနိမ့်ဆုံးအနိမ့်ဆုံးဖယ်ထုတ်ခြင်း) ဖြစ်သည်။
IIC interface ကိုစတင်ပါ
MPU-6050 သည် IIC ကို အသုံးပြု. SDA နှင့် SCL data lines များကို MPU-6050 နှင့်ချိတ်ဆက်ထားသည့် SDA နှင့် Scl data lines များကိုစတင်ရန်လိုအပ်သည်။
MPU-6050 ကို reset
ဤအဆင့်သည် MPU-6050 အတွင်းရှိမှတ်ပုံတင်ထားသောမှတ်ပုံတင်ကို MPU-6050 အတွင်းရှိ၎င်းတို့၏မူလတန်ဖိုးများသို့ 1 (0x6 ခ) တွင် 1 (0x6B) ကိုရေးသည်။Realet ပြီးနောက် Power Management Register 1 ကို Refinited (0x40) သို့ပြန်လည်ရောက်ရှိမည်ဖြစ်ပြီး၎င်းသည် MPU-6050 ကိုနိုးထရန် 0x00 သို့သတ်မှတ်ပြီး၎င်းကိုပုံမှန်အလုပ်လုပ်သောပြည်နယ်သို့ထည့်သွင်းရန်နေရာချထားရမည်။
အပြည့်အဝစကေးအလျင် velocity အာရုံခံကိရိယာ (GYRO) နှင့် acceleration sensor ကိုသတ်မှတ်ပါ
ဤအဆင့်တွင် Gyroscope Configuration Register (0x1b) နှင့်အရှိန်အဟုန်အာရုံခံကိရိယာ configuration register (0x1c) အသီးသီး) အာရုံခံကိရိယာနှစ်ခု (0x1c) အသီးသီး) အာရုံခံကိရိယာနှစ်ခုကိုအာရုံခံကိရိယာနှစ်ခု (FSR) ကိုအပြည့်အဝစကေး (FSR) ကိုသတ်မှတ်ထားသည်။ပုံမှန်အားဖြင့်ကျွန်ုပ်တို့သည် gyroscope ၏ gyroscope ပမာဏကို± 2000dps နှင့် Accelerometer မှ± 2G သို့အပြည့်အဝစကေးအကွာအဝေးကိုသတ်မှတ်ထားသည်။
အခြား parameters တွေကိုသတ်မှတ်
ဤတွင်ကျွန်ုပ်တို့သည်အောက်ပါ parameters တွေကို configure လုပ်ဖို့လိုတယ်။ Interrupts ကိုပိတ်ထားပါ။ AUX I2C interface ကိုပိတ်ထားပါ။ Gyroscope နမူနာနှုန်းကိုပိတ်ထားပါ။ဤအခန်းတွင်ဒေတာများကိုဖတ်ရန်ကြားဖြတ်ခြင်းကိုကျွန်ုပ်တို့မသုံးသောကြောင့်ကြားဖြတ် function ကိုပိတ်ထားရန်လိုအပ်သည်။တစ်ချိန်တည်းမှာပင်ကျွန်ုပ်တို့သည်အခြားပြင်ပအာရုံခံကိရိယာများကိုချိတ်ဆက်ရန် AUX I2C interface ကိုမသုံးသောကြောင့်ကျွန်ုပ်တို့သည်ဤ interface ကိုပိတ်ရန်လိုအပ်သည်။ဤလုပ်ဆောင်ချက်များကို interrupt ည့်သည်မှတ်ပုံတင် (0x38) နှင့်သုံးစွဲသူထိန်းချုပ်မှုမှတ်ပုံတင်ခြင်း (0x6a) မှတဆင့်ထိန်းချုပ်နိုင်သည်။MPU-6050 သည် Sensor အချက်အလက်များကိုသိမ်းဆည်းရန် FIFO ကိုသုံးနိုင်သည်။၎င်းကို FIFO Enable Register (0x23) မှတစ်ဆင့်ထိန်းချုပ်နိုင်သည်။ပုံမှန်အားဖြင့်ဤမှတ်ပုံတင်၏တန်ဖိုးသည် 0 (ထိုအရာသည် FIFO ကိုပိတ်ထားသည်) ထို့ကြောင့်ကျွန်ုပ်တို့သည်မူလတန်ဖိုးကိုတိုက်ရိုက်အသုံးပြုနိုင်သည်။ဂရုတစိုက်၏နမူနာနှုန်းကိုနမူနာနှုန်း divider မှတ်ပုံတင် (0x19) မှထိန်းချုပ်ထားသည်။ပုံမှန်အားဖြင့်ကျွန်ုပ်တို့သည်ဤနမူနာနှုန်းကို 50 အထိသတ်မှတ်ထားသည်။ ဒီဂျစ်တယ်နိမ့် Pass filter (DLPF) ကိုပြင်ဆင်ခြင်း (DLPF) ကိုပြင်ဆင်ခြင်း (0x1A) မှတစ်ဆင့်ပြီးစီးခဲ့သည်။ယေဘုယျအားဖြင့်ပြောရလျှင်အချက်အလက်တိကျမှုနှင့်တုံ့ပြန်မှုမြန်နှုန်းကိုဟန်ချက်ညီစေရန် DLPF ကို bandwidth တစ်ဝက်အထိသတ်မှတ်မည်။
system clock source ကို configure နှင့် angular velocity sensor နှင့် acceleration sensor ကို enable
System Clock Source ၏ setting ္ဌသည် Power Management 1 (0x6B) တွင်မူတည်သည်။ပုံမှန်အားဖြင့်ဤသုံး bit သုံးခုကို 0 မှ 0 င်သည်။ ဆိုလိုသည်မှာစနစ်သည် 8MHz RC Oscillator ကိုနာရီအရင်းအမြစ်အဖြစ်အသုံးပြုသည်။သို့သော်နာရီတိကျမှန်ကန်မှုကိုတိုးတက်စေရန်အတွက်ကျွန်ုပ်တို့သည်၎င်းကို 1 အထိသတ်မှတ်ပြီး X-Axis Gyroscope Pll ကိုနာရီအရင်းအမြစ်အဖြစ်ရွေးချယ်သည်။ထို့အပြင် angular အလျင်အာရုံခံကိရိယာနှင့်အရှိန်အဟုန်အာရုံခံကိရိယာများကိုဖွင့်ပေးခြင်းသည်စတင်ခြင်းလုပ်ငန်းစဉ်တွင်အရေးကြီးသောခြေလှမ်းတစ်ခုဖြစ်သည်။စစ်ဆင်ရေးနှစ်ခုစလုံးကိုပါဝါစီမံခန့်ခွဲမှုမှတ်ပုံတင်ခြင်း 2 (0x6c) မှတစ်ဆင့်အကောင်အထည်ဖော်သည်။သက်ဆိုင်ရာအာရုံခံကိရိယာကိုသက်ဝင်စေဖို့သက်ဆိုင်ရာ bit ကို 0 ထားပါ။အထက်ပါအဆင့်များကိုပြီးစီးပြီးနောက် MPU-6050 သည်ပုံမှန်အလုပ်အခြေအနေကိုထည့်နိုင်သည်။အထူးချမှတ်ထားသည့်မှတ်ပုံတင်သူများသည်စနစ်အားဖြင့် default values preset ကိုချမှတ်လိမ့်မည်။
MPU-6050 သည်မည်သို့အလုပ်လုပ်သနည်း။
Gyro Sensor
အဆိုပါအာရုံခံကိရိယာသည် gyroscopic အကျိုးသက်ရောက်မှုကြောင့်ကန ဦး ဦး တည်ချက်အတွက်အမြဲတမ်းအပြိုင်ဆက်လက်တည်ရှိလိမ့်မည်။ထို့ကြောင့်ကျွန်ုပ်တို့သည် Gyro ၏သွေဖါးကိုကန ဦး ဦး တည်ချက်မှရှာဖွေတွေ့ရှိခြင်းဖြင့်လည်ပတ်မှု၏ ဦး တည်ချက်နှင့်ထောင့်ကိုတွက်ချက်နိုင်သည်။
Accelerometer အာရုံခံကိရိယာ
Accelerometer sensor သည်အရှိန်ကိုတိုင်းတာနိုင်သည့်ကိရိယာတစ်ခုဖြစ်သည်။ ၎င်းသည် piezoelectric အကျိုးသက်ရောက်မှု၏နိယာမအပေါ်အခြေခံသည်။အရှိန်အဟုန်တွင်အာရုံခံကိရိယာသည်အစုလိုက်အပြုံလိုက်ပိတ်ပင်တားဆီးမှုနှင့်သက်ဆိုင်ပြီးအရှိန်မြှင့်တင်ရန်နှင့်နယူတန်၏ဒုတိယမြောက်ဥပဒေကို အသုံးပြု. အရှိန်မြှင့်တင်ထားသည့်ပမာဏကိုတွက်ချက်သည်။
ဒစ်ဂျစ်တယ်ရွေ့လျားမှုပရိုဆက်ဆာ (DMP)
DMP သည် mpu6050 chip တွင် data processing module တစ်ခုဖြစ်ပြီး Gyroscope နှင့် Accelerometer အာရုံခံကိရိယာများမှအချက်အလက်များကိုရယူရန်နှင့် output foratterions များကိုရယူခြင်းအတွက် algorithm ကိုစစ်ထုတ်ရန် Kalman filtering filter-algorithm filtering filtering filters ။ဤအင်္ဂါရပ်သည်အရံမိုက်ခရိုပရိုဆက်ဆာ၏ပမာဏကိုများစွာလျော့ကျစေပြီးငြီးငွေ့ဖွယ်စစ်ထုတ်ခြင်းနှင့်အချက်အလက်ပေါင်းစပ်ခြင်းလုပ်ငန်းစဉ်ကိုရှောင်ရှားသည်။
မှတ်စုများ
Quunterions: Quaternions ရိုးရှင်းတဲ့ supercomplex နံပါတ်များဖြစ်ကြသည်။ရှုပ်ထွေးသောနံပါတ်များကိုအစစ်အမှန်နံပါတ်များဖြင့်ဖွဲ့စည်းထားပါသည်။
MPU -050 ဘယ်မှာလဲ။
- ကစားစရာများ
- ဟန်းဆက်နှင့်အိတ်ဆောင်ဂိမ်း
- Motion-based ဂိမ်း Controlller များ
- Blurfree ™နည်းပညာ (ဗီဒီယို / ရုပ်ပုံတည်ငြိမ်မှုအတွက်)
- Airsign ™နည်းပညာ (လုံခြုံရေး / authentication အတွက်)
- Independegesture ™ Gest ™အမူအရာအသိအမှတ်ပြုခြင်း
- ကျန်းမာရေး, ကြံ့ခိုင်ရေးနှင့်အားကစားများအတွက်ဝတ်ဆင်အာရုံခံကိရိယာများ
- Motion-Enabled ဂိမ်းနှင့်လျှောက်လွှာမူဘောင်
- MIXOMOMMANMANCOM ™နည်းပညာ (အမူအယာတိုတိုဖြတ်တောက်မှုများအတွက်)
- တည်နေရာအခြေပြု 0 န်ဆောင်မှုများ, စိတ်ဝင်စားမှုအချက်များနှင့်သေပြီ
- အင်တာနက်အတွက် 3D အဝေးထိန်းထိန်းချုပ်မှုသည် DTVs နှင့်ချိတ်ဆက်ပြီးထိပ်ဆုံးအကွက်များ, 3D ကြွက်များကိုသတ်မှတ်သည်
- Touchany နေရာ™နည်းပညာ ("Touch" UI လျှောက်လွှာထိန်းချုပ်မှု / အညွှန်းရှာဖွေရန်)
MPU-6050 အထုပ်

MPU-6050 ၏ဆူညံသံကိုမည်သို့လျှော့ချရမည်နည်း။
MPU-6050 ၏ဆူညံသံကိုလျှော့ချရန်အောက်ပါနည်းလမ်းများကိုကျွန်ုပ်တို့ယူနိုင်သည်။
Calibrated အာရုံခံကိရိယာကိုသုံးပါ
MPU-6050 ၏ accelerometer နှင့် gyroscope ကိုချိန်ညှိခြင်းသည်အာရုံခံကိရိယာများ၏ဘက်လိုက်မှုနှင့်အမှားများကိုဖယ်ရှားနိုင်သည်။ ထို့ကြောင့်ဆူညံသံများ၏အကျိုးသက်ရောက်မှုကိုလျှော့ချနိုင်သည်။စံကိုက်ညှိခြင်းလုပ်ငန်းစဉ်သည်များသောအားဖြင့် static စံကိုက်ညှိနှိုင်းခြင်းနှင့်ကူးသန်းရောင်းဝယ်ရေးစံကိုက်ညှိခြင်းတို့ပါဝင်သည်။
ဟာ့ဒ်ဝဲ filtering လုပ်ငန်းစဉ်
filter capacitors များကို MPU-6050 ၏စွမ်းအားကို MPU-6050 မှပါဝါလိုင်းသို့ထည့်ခြင်းကစွမ်းအင်ထောက်ပံ့မှုဆူညံသံများ၏သက်ရောက်မှုကိုလျှော့ချနိုင်သည်။ဤအတောအတွင်း PCB layout တွင် MPU-6050 ကိုအလားအလာရှိသောအချက်အချာကျသောလိုင်းများနှင့်ပါဝါအစိတ်အပိုင်းများစသည့် 0 င်ရောက်စွက်ဖက်မှုအရင်းအမြစ်များနှင့်မကိုက်ညီစေရန်ကြိုးစားသင့်သည်။
software filtering processing
MPU-6050 မှကုန်ကြမ်းအချက်အလက်များကိုစုဆောင်းပြီးနောက်ဆူညံသံသွေးဆောင် 0 င်ရောက်စွက်ဖက်မှုကိုဖယ်ရှားရန်ကန ဦး ဒေတာများကိုကြိုတင်လုပ်ဆောင်ရန်ဆော့ဖ်ဝဲ filtering link ကိုကျွန်ုပ်တို့ထည့်နိုင်သည်။အသုံးအများဆုံးဆော့ဖ်ဝဲ filtering နည်းလမ်းများတွင် filtering, ပျမ်းမျှစစ်ထုတ်ခြင်း,
အတွင်းပိုင်းနိမ့်ကျသော filter ကိုသုံးပါ
MPU-6050 တွင်ပြည်တွင်းပေါင်းစပ်ထားသောဒီဂျစ်တယ်နိမ့်နိမ့် Pass filter ရှိပြီး cutoff ကြိမ်နှုန်းကိုသတ်မှတ်ခြင်းဖြင့်ကြိမ်နှုန်းမြင့်ဆူညံသံကိုလျှော့ချရန်အသုံးပြုနိုင်သည်။အထူးသဖြင့်ကျွန်ုပ်တို့သည် MPU-6050 ၏ config revision ကိုပြင်ဆင်ခြင်းဖြင့် Digital filter ၏ကြိမ်နှုန်းကို သတ်မှတ်. A / D နမူနာများကြောင့်ဖြစ်ပေါ်လာသောမြင့်မားသောဆူညံသံကိုဖယ်ရှားရန် MPU-6050 မှတ်ပုံတင်ခြင်းကိုပြင်ဆင်ခြင်းဖြင့် Digital filter filter ကိုသတ်မှတ်နိုင်သည်။
MPU -050-based Motion Rearory
MPU-6050 သည် 0 ိညာဉ်ခြောက်ခုနှင့် Gyroscope Sensor ဖြစ်ပြီးအရာဝတ်ထုများ၏လှုပ်ရှားမှုနှင့်သဘောထားကိုတိုင်းတာရန်အသုံးပြုနိုင်သည့် Gyroscope Sensor ဖြစ်သည်။MPU-6050 ကို အခြေခံ. Motion Rebory တွက်ချက်မှုကိုအောက်ပါအဆင့်များဖြင့်သဘောပေါက်နိုင်သည်။
ပထမအဆင့်မှာအာရုံခံကိရိယာအချက်အလက်များကိုဖတ်ရန်ဖြစ်သည်။သင့်လျော်သောယာဉ်မောင်းများနှင့်စာကြည့်တိုက်လုပ်ဆောင်မှုများကို MPU-6050 အာရုံခံကိရိယာများမှ Accelerometer နှင့် gyroscope အချက်အလက်များကိုဖတ်ရန်လိုအပ်သည်။ဤအချက်အလက်များသည်များသောအားဖြင့်ဒီဂျစ်တယ်ပုံစံဖြင့်ထုတ်လုပ်ခြင်းဖြစ်သဖြင့်အချို့သောပြောင်းလဲခြင်းနှင့်စံကိုက်ညှိခြင်းလုပ်ငန်းသည်ရုပ်ပိုင်းဆိုင်ရာယူနစ်များတွင်အမှန်တကယ်တိုင်းတာမှုများသို့ပြောင်းလဲရန်လိုအပ်သည်။
ဒုတိယအဆင့်သည်အရှိန်ကိုတွက်ချက်ရန်ဖြစ်သည်။ပထမ ဦး စွာကျွန်ုပ်တို့သည် Accelerometer မှအရာဝတ်ထုတစ်ခုစီ၏အရှိန်ကိုအရှိန်မြှင့်တင်ရန် Accelerometer မှအချက်အလက်များကိုလုပ်ဆောင်ရန်လိုအပ်သည်။နောက်ပိုင်းတွင် 0 င်ရိုးတစ်ခုစီတွင်အရာဝတ်ထုများ၏အလျင်နှင့်အိုးအိမ်စွန့်ခွာထွက်ပြေးမှုကိုတွက်ချက်ရန်အတွက်အရှိန်အဟုန်ကိုပေါင်းစည်းရန်လိုအပ်သည်။Euler ၏နည်းလမ်းသို့မဟုတ် Lunger-Kutta Method ကဲ့သို့သောကိန်းဂဏန်းပေါင်းစည်းမှုနည်းစနစ်များကိုဤလုပ်ငန်းစဉ်တွင်မကြာခဏအသုံးပြုလေ့ရှိသည်။
တတိယအဆင့်မှာ angular အလျင်ကိုတွက်ချက်ရန်ဖြစ်သည်။Gyroscope အချက်အလက်များကိုအသုံးပြုခြင်း, 0 င်ရိုးတစ်ခုစီတွင်အရာဝတ်ထု၏ angular အလျင်ကိုတွက်ချက်နိုင်သည်။တနည်းကား, ဤဒေတာကိုအမှန်တကယ်ရုပ်ပိုင်းဆိုင်ရာယူနစ်များတွင် angular အလျင်ရရှိရန်ချိန်ညှိခြင်းနှင့်ပြောင်းလဲရန်လိုအပ်သည်။
စတုတ်ထအဆင့်သည်လည်ပတ်မှုကိုတွက်ချက်ရန်ဖြစ်သည်။angular အလျင်ဒေတာကိုပေါင်းစပ်ခြင်းအားဖြင့် 0 င်ရိုးတစ်ခုစီရှိအရာဝတ်ထု၏လည်ပတ်မှုထောင့်ကိုတွက်ချက်နိုင်သည်။၎င်းကိုထောင့်တွက်ချက်ရန် Euler ၏နည်းလမ်း (သို့) tizer-kutta နည်းလမ်းကဲ့သို့သောကိန်းဂဏန်းပေါင်းစည်းမှုနည်းစနစ်များကိုပြုလုပ်နိုင်သည်။
ပဉ္စမအဆင့်သည်အချက်အလက်များကိုပေါင်းစည်းရန်ဖြစ်သည်။အရာဝတ်ထု၏ပြည့်စုံသောသဘောထားနှင့်အနေအထားသတင်းအချက်အလက်များကိုရရှိရန် Accelerometers နှင့် gyroscopes များမှအချက်အလက်များကိုကျွန်ုပ်တို့ပေါင်းစပ်ထားသည်။၎င်းကို algorithms များကို algorithms ကို အသုံးပြု. algorithms ကို အသုံးပြု. Solver သို့မဟုတ် Euler angle solver solver ကို အသုံးပြု. ပြုလုပ်နိုင်သည်။
ဆဌမခြေလှမ်းသည်ရလဒ်များကိုမြင်ယောင်ရန်ဖြစ်သည်။ကျွန်ုပ်တို့သည်တွက်ချက်မှုအရာဝတ်ထုရွေ့လျားမှုလမ်းကြောင်းကို 3D ညှိနှိုင်းမှုစနစ်တွင်အချက်များအဖြစ်သို့ပြောင်းလဲပြီးအရာဝတ်ထု၏လှုပ်ရှားမှုလမ်းကြောင်းများနှင့်သဘောထားပြောင်းလဲမှုများအတွက်ပိုမိုအလိုလိုသိသောနားလည်မှုအတွက်သင့်လျော်သော visualization tools များကိုအသုံးပြုသည်။
မကြာခဏမေးသောမေးခွန်းများ [မကြာခဏမေးလေ့ရှိသောမေးခွန်းများ]
1. MPU6050 မည်မျှတိကျမှန်ကန်သနည်း။
ရရှိသောရလဒ်များအရ 1% အောက် သာ. ယုံကြည်စိတ်ချရမှုထက်နည်းသည်နှင့်ယုံကြည်စိတ်ချရမှုတွင်လုံလောက်သောတိကျမှုနှင့်ဓာတ်လှေကားလုပ်ငန်း၏မြင့်မားသောစံချိန်စံညွှန်းများကိုသင့်လျော်စွာရှုမြင်နိုင်ကြောင်းပြသခဲ့သည်။
2. MPU6050 မှအချက်အလက်များကိုမည်သို့ဖတ်ရမည်နည်း။
MPU6050 မှတ်ပုံတင်ကိုဖတ်ရန် Master သည် Start System ကိုပေးပို့ပြီးနောက်မှ I2C ကျွန်လိပ်စာနှင့်စာရေးဆွဲမည့်စာရင်းတွင်ပါ 0 င်သည်။
3. MPU6050 ဘယ်မှာလဲ။
0 တ်ဆင်နိုင်သောကျန်းမာရေးခြေရာခံခြင်း, ကြံ့ခိုင်ရေး - ခြေရာခံကိရိယာများအတွက်။မောင်းသူမဲ့လေယာဉ်များနှင့် quadcopters များတွင် MPU6050 ကိုရာထူးထိန်းချုပ်ရန်အသုံးပြုသည်။စက်ရုပ်လက်မောင်းထိန်းချုပ်ရာတွင်အသုံးပြုခဲ့သည်။လက်ကိုယ်ဟန်အမူအရာထိန်းချုပ်ကိရိယာများ။
4. MPU6050 imu လား။
MPU6050 IMU Sensor Block သည် MPU-6050 အာရုံခံကိရိယာမှဒေတာနှင့်ချိတ်ဆက်ထားသော MPU-6050 အာရုံခံကိရိယာမှအချက်အလက်များကိုဖတ်သည်။အဆိုပါပိတ်ပင်တားဆီးမှု output ကိုအရှိန်မြှင့်ထုတ်ပေး, angular နှုန်းနှင့်အာရုံခံကိရိယာ၏ပုဆိန်တလျှောက်အပူချိန်။
5. MPU6050 ၏အပြောင်းအလဲကဘာလဲ။
၎င်းသည် Accelerometer နှင့် gyroscope မှလာသည့်အချက်အလက်များကိုပေါင်းစပ်ထားသော MPU6050 ၏ Onboard Processor ဖြစ်သည်။DMP သည် MPU6050 ကိုအသုံးပြုရန်သော့ချက်ဖြစ်ပြီးအသေးစိတ်ရှင်းပြရန်ဖြစ်သည်။Microprocessors အားလုံးနှင့်အတူ DMP သည် firmware များတပ်ဆင်ရန်အတွက် firmware လိုအပ်သည်။
function ကိုစမ်းသပ်။ကုန်ကျစရိတ်အမြင့်ဆုံးသောထုတ်ကုန်များနှင့်အကောင်းဆုံး 0 န်ဆောင်မှုသည်ကျွန်ုပ်တို့၏ထာဝရကတိကဝတ်ဖြစ်သည်။
ဆောင်းပါး
- CR2032 နှင့် CR2016 အပြန်အလှန်လဲလှယ်နိုင်သည်
- Mosfet: အဓိပ္ပါယ်, အလုပ်လုပ်နိယာမနှင့်ရွေးချယ်ခြင်း
- relay installation နှင့်စမ်းသပ်ခြင်း, relay wiring ကားချပ်များ၏ဘာသာပြန်
- CR2016 vs. CR2032 ခြားနားချက်ကဘာလဲ
- NPN vs. PNP: ခြားနားချက်ကဘာလဲ။
- ESP32 vs STM32: မည်သည့် microcontroller သည်သင့်အတွက်ပိုကောင်းသနည်း။
- LM358 dual လုပ်ငန်းဆိုင်ရာဘက်စုံဘက်စုံဘက်စုံလမ်းညွှန် - Pinouts, circuit apcroads, equalities, အသုံးဝင်သောဥပမာများ
- CR2032 vs DL2032 VS CR2025 နှိုင်းယှဉ်လမ်းညွှန်
- ကွဲပြားခြားနားမှုများ ESP32 နှင့် ESP32-S3 နည်းပညာနှင့်စွမ်းဆောင်ရည်ကိုလေ့လာခြင်း
- RC စီးရီး circuit ၏အသေးစိတ်ခွဲခြမ်းစိတ်ဖြာ
 NRF24L01 ဆက်သွယ်ရေးချစ်ပ်၏စွမ်းရည်နှင့် applications များကိုရှာဖွေခြင်း
NRF24L01 ဆက်သွယ်ရေးချစ်ပ်၏စွမ်းရည်နှင့် applications များကိုရှာဖွေခြင်း
2024-04-25
 MMBT3904 NPN Transistor - ၎င်း၏သတ်မှတ်ချက်များ, ပြည့်စုံသောလျှောက်လွှာလမ်းညွှန်နှင့် MMBT3904 vs. MMBT5551
MMBT3904 NPN Transistor - ၎င်း၏သတ်မှတ်ချက်များ, ပြည့်စုံသောလျှောက်လွှာလမ်းညွှန်နှင့် MMBT3904 vs. MMBT5551
2024-04-25
အပူပိုင်းနံပါတ်
 04025C103KAT2A
04025C103KAT2A C1608NP02A680J080AA
C1608NP02A680J080AA CLLE1AX7R1A154M050AC
CLLE1AX7R1A154M050AC- C1608CH2A331J080AA
 CL21F104ZBANNND
CL21F104ZBANNND 12065C152JAT2A
12065C152JAT2A QMK316B7683MLHT
QMK316B7683MLHT TPSC107K006R0150
TPSC107K006R0150 F951D335KAAAQ2
F951D335KAAAQ2 TACL155K010FTA
TACL155K010FTA
- EP3C40F484I7
- AP3608EGTR-G1
- VE-J63-MX
- ISL84467IRTZ-T
- BD8158FVM-TR
- RT0402DRE072KL
- VI-234-CU
- 1MBI200NA-060
- APT30D60BCA
- BSM300GB12DLC
- SKKD260/20H4
- VI-910526
- VI-JW0-EY/F4
- VI-LU2-CW
- SN65HVD3083EDGS
- HMC515LP5E
- DCM3623TA5N26B4T70
- LMP2016MMX/NOPB
- LV47004P-E
- UCC2972PW
- ADP7102ACPZ-5.0-R7
- T495A105M035ZTE3K0
- AD8332ARUZ-REEL
- ADSP-BBF532W
- ADV202BBC
- ICE3B0565J
- IDT70P3519S200BFG
- M34282M2-158GP
- W83L5180
- GALI-84+
- KS57C2616-QN
- MT8193A/B
- ZR38500PQC
- IT8705F-FXS
- DRA628PC7IZKKQ1
- PS8331AQFN60GTR-A2
- SDINEDK4-128-893T
- MBDKT2510E
- TPS61200DRC